PHS用モバイルカメラのTREVAを使った画像認識です。
テニスボールの方向へ走っていくロボットを製作しました。
このロボットの製作にあたっては以下のページを参考にさせていただきました。
現時点では、まだまだ単なるマネマネです。。。。
いしかわきょーすけのホームページ [http://www.asahi-net.or.jp/~qx5k-iskw/]
AAFぱ研 [http://www.paken.org:8080/aaf/]
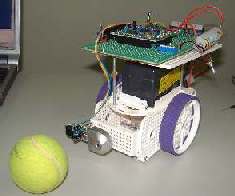
台車は市販品です。ロボカップトイズ関係のおもちゃだったかな?
ボディー全体に穴があいているので、いろいろ便利です。バッテリーもジャストフィット♪
マイコンはH8-3048Fです。AKI-H8はマザーボードもあるし、情報も豊富だし、マイコン入門にはピッタリ!
画像1枚あたりのファイルサイズがRAMの容量を越えているため、一枚丸ごとは保持できないのが難。
 少しでも速く画像認識を行うために、画像の上下をカットしちゃいました。
今回はテニスボールが水平な床の上に存在する場合のみを想定しているので
画像の上のほうと下のほうは、あんまし必要ないみたいです。
ボールの座標もX座標だけ求めています。
具体的には、カットする部分はクロックだけ送り、
画像の取り込み、評価は行っていません。
これにより若干速くはなりましたが、それでもまだまだ遅い。
クロックを送るだけでも、時間のロスは大きいですな。
やはりソフトウェアで通常の入力ポートをHIGH-LOWさせているからだと思います。
TREVAの画像をPCに表示させるソフトは、いしかわきょうすけ氏のWEBで公開されているものです。
少しでも速く画像認識を行うために、画像の上下をカットしちゃいました。
今回はテニスボールが水平な床の上に存在する場合のみを想定しているので
画像の上のほうと下のほうは、あんまし必要ないみたいです。
ボールの座標もX座標だけ求めています。
具体的には、カットする部分はクロックだけ送り、
画像の取り込み、評価は行っていません。
これにより若干速くはなりましたが、それでもまだまだ遅い。
クロックを送るだけでも、時間のロスは大きいですな。
やはりソフトウェアで通常の入力ポートをHIGH-LOWさせているからだと思います。
TREVAの画像をPCに表示させるソフトは、いしかわきょうすけ氏のWEBで公開されているものです。
取り込み~評価に時間がかかるので、
近くで旋回すると通り過ぎる時があります。
サーバーが動画を置くことを禁止しているようです。
置き場探し中(^^;
H8-3067Fへの移行。RAMの容量が大きいため、画像を一枚丸ごと取り込めます。
通信ポートとTREVAを接続し、高速な画像処理を目指します。。
[戻る]
[★高収入が可能!WEBデザインのプロになってみない?!
 自宅で仕事がしたい人必見!
自宅で仕事がしたい人必見!
 ]
]
[ CGIレンタルサービス | 100MBの無料HPスペース | 検索エンジン登録代行サービス ]
[ 初心者でも安心なレンタルサーバー。50MBで250円から。CGI・SSI・PHPが使えます。 ]
]
 キャッシング
キャッシング  花
花 出会い 無料アクセス解析
出会い 無料アクセス解析